2019-08-24 click: 9476
0.引言
齒輪在工業生產生活中應用極為廣泛,隨著現代工業和科學技術的快速發展進步,齒輪(lún)震動,效率壽命等指標越來越受到重視,對齒輪(lún)的精度要求越(yuè)來越高。齒輪測量過程中,測量儀器回轉工作台的回(huí)轉軸線與齒輪的幾何中(zhōng)心很難重(chóng)合[1~4],這樣就產生了安裝偏心,導致齒輪的測量基準與齒輪(lún)製造基(jī)準或(huò)者齒輪使用(yòng)基準的不一致,測量(liàng)結(jié)果中帶有由於工件安裝不準確帶來的安裝誤差,從而不能準確反應齒(chǐ)輪(lún)加工精度,所以正確采用(yòng)誤(wù)差補償的方法(fǎ)消除安裝偏心產生的(de)齒形偏差具有(yǒu)重要意義。
齒輪測量中心上的齒輪安裝誤差包括(kuò)齒輪軸線相對於轉台軸線的平移誤差和傾斜誤差。其中,一般齒輪軸線的平移誤差稱為偏(piān)心,齒輪軸線的傾斜誤差稱為偏擺。為了保證測量結果的精度需(xū)要消除由安裝引入(rù)的(de)這兩項誤差帶來(lái)的誤差成分。研究(jiū)解(jiě)決這一難題有助於提升儀器的測量(liàng)精度(dù),進而(ér)提升國內的齒輪測(cè)量中心的國際競爭力。針對齒輪安(ān)裝誤差中某些(xiē)特定齒輪測量項的修正問題,不少文章提出了不同的解決辦法或模型,但未(wèi)見在齒輪測量中心上得到很好的應用。本文依據坐標變換原理提出了齒輪偏心測量模型,很好的解決(jué)了齒輪在偏心情況下(xià)的齒形測量問(wèn)題。隨(suí)著研究的深入,齒輪測量(liàng)模型還(hái)可擴展(zhǎn)到齒距、齒向測量誤差修正過程中,可(kě)完全解決齒輪在測量過程中的安裝誤差問題。
1.補償安裝偏心的基本原理
齒輪測量中心在測(cè)量齒形過程(chéng)中可以選擇(zé)多種測量方法對齒輪進行測量,而法向極坐標測量法因其測量(liàng)聯動軸數少及控(kòng)製方式簡單的優點應用範圍最廣。法向(xiàng)極坐(zuò)標測量法如圖1-1所示,該(gāi)方法是根據齒輪齒(chǐ)廓的展成原理,規定漸開線的(de)展長方向為(wéi)測量方向,將其轉化為展(zhǎn)長長度測量。由(yóu)漸開線的形成原理可以知道,漸開線的法向極坐標方程為:

式中:L為被測點的展(zhǎn)開長度  ;為基(jī)圓半徑
;為基(jī)圓半徑  ;為被(bèi)測點對應的展開(kāi)角。
;為被(bèi)測點對應的展開(kāi)角。
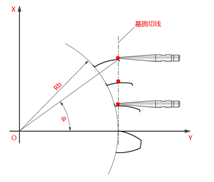
圖1-1 法向極坐標測量齒形
由於齒(chǐ)輪存在加工誤差,在用法(fǎ)向極坐標法測量時,測頭(tóu)一直保持隨基(jī)圓的切向X軸方向(xiàng)做直線運動,如圖1-1所示。但實際測量時測球會隨著齒麵(miàn)誤差相對擺動,實際被測點測量展長與理論展長差值即為齒麵偏差。
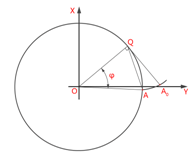
齒輪測量是一個(gè)動態測量過程,即齒輪繞回轉中心O旋(xuán)轉,測頭沿切向(xiàng)X軸直線運動。由於安裝偏心,齒輪的幾何中心與回轉中心O不重合如圖1-2(a)所示,直接引起被測點基圓半徑的(de)變化如圖1-2(b)所示,由公式(1)可知,實際測(cè)量展長隨著基圓半徑的變(biàn)化而變化,展長與展角不(bú)再(zài)是(shì)線性關係。但在(zài)實際(jì)測量過程中,測量(liàng)動(dòng)作保持不變,既而由測頭讀數直接(jiē)計算齒麵誤差(chà),所得結果包(bāo)含了安裝偏心引起的(de)測量誤差,使得測量(liàng)結果不夠準確。如(rú)圖(tú)1-2(b)所(suǒ)示,在沒有安裝偏(piān)心的情(qíng)況下,被測點為A,安裝(zhuāng)偏(piān)心後測量點為  ,由於受到安裝偏心的影(yǐng)響,所有測量點都發生改變(biàn)。
,由於受到安裝偏心的影(yǐng)響,所有測量點都發生改變(biàn)。
首先利用二維坐標變換原(yuán)理,將實際坐標點回歸到在靜止狀(zhuàng)態下齒輪(lún)漸開線的坐標位置,既而得到漸開線上所(suǒ)有被測點坐標。安裝偏心補(bǔ)償為事後補償,即已知齒輪水平偏心和偏擺,平移漸開線上所有被測點坐標消除水平偏(piān)心帶來的影響,然後在已知偏擺的情(qíng)況下,利用三維坐標變換原理,去除水平偏心(xīn)的所有被(bèi)測點坐標進行(háng)兩(liǎng)次坐標轉換,進一步得到去除偏擺的所有被測點坐標。以起測點為參考點,即(jí)齒麵誤差為零,利用幾何關係式求解以起測點(diǎn)為準的(de)理論漸(jiàn)開線上對應的被測點坐標,既而分別求出被測點理(lǐ)論展長與實際展(zhǎn)長,二(èr)者之(zhī)差即為實際齒麵加工誤差。
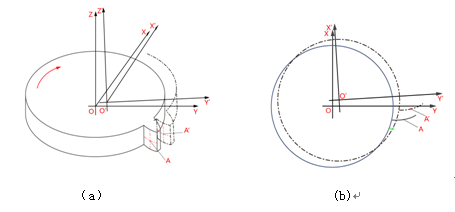
圖1-2 齒輪(lún)安裝偏心數學模型
2. 安裝偏心齒輪測量理(lǐ)論數(shù)學(xué)模型的建立(lì)
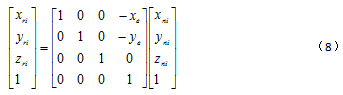
在(zài)測量過程中,轉台帶動齒輪旋轉,同時齒輪測量中心控製測杆在X軸方向移動一定距(jù)離,獲(huò)取(qǔ)工件在測量(liàng)儀器坐標(biāo)係下所有被測點的相對轉角(jiǎo)值  以及坐標(biāo)點位置
以及坐標(biāo)點位置  ,通過二維坐標變換原理,將齒輪在動(dòng)態測量過程所有被測點坐標還原到齒輪靜止狀態下的坐標位置
,通過二維坐標變換原理,將齒輪在動(dòng)態測量過程所有被測點坐標還原到齒輪靜止狀態下的坐標位置  ,方(fāng)程表達式如下:
,方(fāng)程表達式如下:
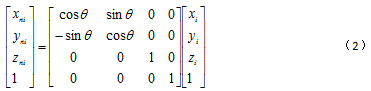
式中:  為轉台旋(xuán)轉角度(順時針方向為正(zhèng))。
為轉台旋(xuán)轉角度(順時針方向為正(zhèng))。
由於齒輪存在加工誤差,所得坐標點並非齒輪漸開線理(lǐ)論軌跡坐標點,所以需要通過實際被測點坐標建立直角坐(zuò)標係下理(lǐ)論漸開線數學方程,如圖2-1所示,令起測點(diǎn)  為參(cān)考點建(jiàn)立理(lǐ)論漸開線,記此點齒麵誤差為零,利用圓外一點的切線方程求得切點坐標
為參(cān)考點建(jiàn)立理(lǐ)論漸開線,記此點齒麵誤差為零,利用圓外一點的切線方程求得切點坐標  ,則起(qǐ)測點(diǎn)
,則起(qǐ)測點(diǎn)  的展長可由(yóu)起測點
的展長可由(yóu)起測點  和切點
和切點  得到,即:
得到,即:

進一步求得展角為

然後由幾何關係求得漸開線起始點坐標  ,漸開線起點和切(qiē)點坐標確定後,利用餘弦定理求(qiú)得起測點
,漸開線起點和切(qiē)點坐標確定後,利用餘弦定理求(qiú)得起測點  展角為:
展角為:

則理論展長表達式(shì)如下:

實際(jì)展長表達式如下:

最終齒麵誤差為  。
。
圖(tú)2-1 理論漸開線數學模(mó)型
同理求得齒麵所有(yǒu)被測點齒(chǐ)麵誤(wù)差。
3.安裝(zhuāng)偏心誤差修正
3.1水平偏心(xīn)修正
偏心(xīn)修正(zhèng)為(wéi)事後補償,即(jí)在已知齒輪(lún)測量截麵偏心平(píng)移向量 前提下利用偏心修正數學(xué)模型去掉安裝偏心帶來的測量誤差成分,表達式如下:
前提下利用偏心修正數學(xué)模型去掉安裝偏心帶來的測量誤差成分,表達式如下:
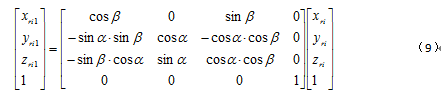
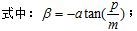
3.2偏擺誤差修正(zhèng)
 和
和 ,可以求得空間(jiān)直線矢量的方向餘弦
,可以求得空間(jiān)直線矢量的方向餘弦 ,其中
,其中 ,利用三維坐標變換原理,將此空間直線做兩次(cì)旋轉即可保證與回轉軸(zhóu)線重合,可得當前被測點實際坐標公式:
,利用三維坐標變換原理,將此空間直線做兩次(cì)旋轉即可保證與回轉軸(zhóu)線重合,可得當前被測點實際坐標公式:

然後將去掉水(shuǐ)平偏心和偏(piān)擺後(hòu)的坐標位置代入上述表達式中,最(zuì)終求得實際齒麵誤差為(wéi):

4.測量(liàng)實驗
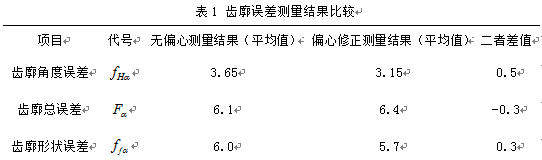
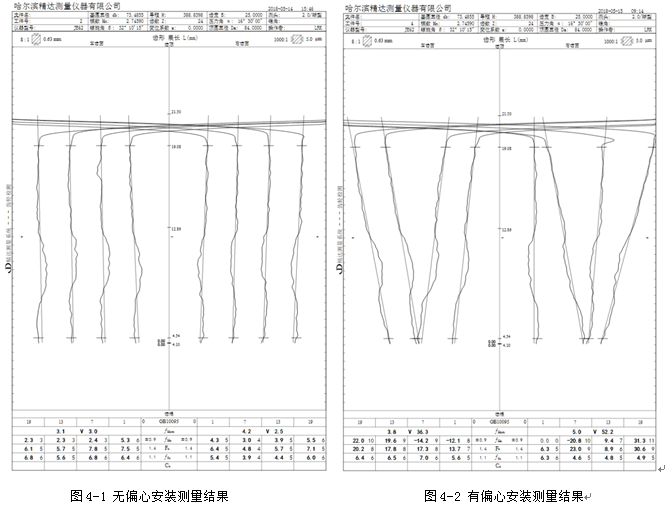
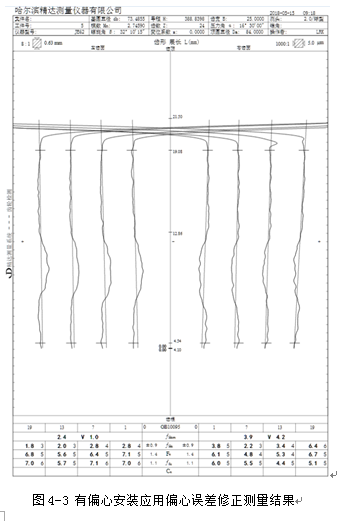
測量實驗采用(yòng)模數為2.7459,齒數(shù)為(wéi)24的(de)標準漸開線圓柱齒輪,齒輪的齒形測量一般(bān)隻需(xū)測量四個近似等分(fèn)點上的齒輪,以這四個齒輪的齒形誤差代替整個(gè)齒輪的齒形誤差。為了做對比實驗,本文選用了一(yī)上下頂尖定位的(de)標準斜齒,實驗前先在齒輪上的一齒上做標記,以保證接下來(lái)的幾次測量都是(shì)測量同樣的齒麵(miàn)。第一次(cì)測量時(shí)通過上下頂尖安裝齒輪,可認為齒輪無安裝誤差,測得齒形結(jié)果如圖4-1所示,第二(èr)次測量人工製造安裝偏心誤差,測得齒形結果如圖4-2所示,第三次測量通(tōng)過偏心修正算法(fǎ)測量齒輪齒(chǐ)形,測得齒形結果如圖4-3所示。對同一齒輪同一齒麵三次測量測量結果對比,結果如表(biǎo)1所示。
重(chóng)複測量5次,測量各項誤差結果保證在±1μm以內(nèi),可以實現偏心(xīn)修正功能,並且測量結果穩定,精度和準確度很高。
5.總結
本文提出了一種新穎的(de)偏(piān)心(xīn)修正補償的測(cè)量方法,有效的解決了安裝偏心降低齒輪測量結果精度的(de)難題,保證了齒輪測量結果的準(zhǔn)確度和精度(dù)。經過實(shí)際測試(shì)表明,該測量(liàng)方法正(zhèng)確可行,測量結果穩定、準確。
參考(kǎo)文獻:
[1]宋承(chéng)誌. 大型(xíng)齒輪測量中心齒輪安裝誤差補償技術研究(jiū)[D].哈爾濱工(gōng)業大學,2014.
[2]孫慧霖.漸開線圓(yuán)柱齒(chǐ)輪測量誤差的分析與修(xiū)正(zhèng).哈爾濱理工大學,2012.
[3]郭敬濱,張大廈,張繼成.大齒輪齒形測量中補償(cháng)安裝偏心的理(lǐ)論(lùn)分析.天津大學學報,2012.05.
[4]楊燕鴿.齒(chǐ)輪安裝(zhuāng)偏心情況下在機測量方法的研究.西安工業大學,2012.
上一篇 飛輪齒圈自動檢測線
 |
|
|
|
|
|
|
一掃進行工廠參觀")